PICK AND PLACE ROBOTS
- Pick and place robot speeds up the process of picking parts up and placing them in new locations, while also increasing production rates.The consistency, quality and repeatability of a pick and place robot system is unmatched.These systems are also versatile and can be reprogrammed and tooled to provide multiple applications for consumers.
- An increase in output with a pick and place robot system offer long-term savings to companies with the advancements in technology and affordability of robots, more pick and place robots are being installed for automation applications.
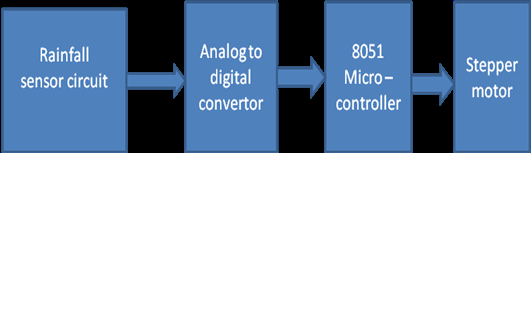
The basic form of pick and place robot is shown in Fig.
- The robot has three axis about which motion can occur.The following movements are required for the robot.
- clockwise,anticlockwise,rotation of robot unit on its own axis.
- Linear movement of arm horizontally. i.e extension or contraction of the arm.
- Up and down movement of the arm.
- open and close movement of the gripper.

- The foresaid movements can be obtained by pneumatic cylinder which is operated by solenoid valves with limit switches.Limit switches are used to indicate when a motion is completed.
- The clockwise rotation of the robot unit on its base can be obtained from a piston and cylinder arrangement during pistons forward movement. Similarly counter clockwise rotation can be obtained during backward movement of the piston in cylinder.


APPLICATIONS:
1. It can be used in Production industry.
2. In mass production.
3. In Automobile Industry.
4.High speed assembly.
5.Packing
ADVANTAGES:
Quality:
Industrial automated mechanical arm have the capacity to dramatically improve product quality. Applications are performed with precision and high repeatability every time. This level of consistency can be hard to achieve any other way.
Production:
With mechanical arm, throughput speeds increase, which directly impacts production. Because an automated mechanical arm has the ability to work at a constant speed without pausing for breaks, sleep, vacations, it has the potential to produce more than a human worker.
With mechanical arm, throughput speeds increase, which directly impacts production. Because an automated mechanical arm has the ability to work at a constant speed without pausing for breaks, sleep, vacations, it has the potential to produce more than a human worker.
Safety:
mechanical arm increase workplace safety. Workers are moved to supervisory roles where they no longer have to perform dangerous applications in hazardous settings.
mechanical arm increase workplace safety. Workers are moved to supervisory roles where they no longer have to perform dangerous applications in hazardous settings.
Savings:
Improved worker safety leads to financial savings.Automated mechanical arm also offer untiring performance which saves valuable time. Their movements are always exact, minimizing material waste.
Improved worker safety leads to financial savings.Automated mechanical arm also offer untiring performance which saves valuable time. Their movements are always exact, minimizing material waste.
DIS-ADVANTAGES:
Expense:
Regular maintenance needs can have a financial toll as well.
Regular maintenance needs can have a financial toll as well.
ROI:
Incorporating industrial robots does not guarantee results. Without planning, companies can have difficulty achieving their goals.
Incorporating industrial robots does not guarantee results. Without planning, companies can have difficulty achieving their goals.
Expertise:
Employees will require training program and interact with the new robotic equipment. This normally takes time and financial output.
Employees will require training program and interact with the new robotic equipment. This normally takes time and financial output.
Safety:
Robots may protect workers from some hazards, but in the meantime, their very presence can create other safety problems. These new dangers must be taken into consideration.
Robots may protect workers from some hazards, but in the meantime, their very presence can create other safety problems. These new dangers must be taken into consideration.